Dobot MG400 ROS2 Repository.

| ROS2 Distro | Branch | Build status |
|---|---|---|
| humble | humble |
- ROS 2
- Ubuntu22 : Humble Hawksbill
- MG400
mkdir -p ~/ws_ros2/src
cd ~/ws_ros2/src
git clone [email protected]:HarvestX/MG400_ROS2.gitsource /opt/ros/$ROS_DISTRO/setup.bash
cd ~/ws_ros2/src/MG400_ROS2
./setup.bash
exec -l $SHELLOpen new terminal and type followings.
source /opt/ros/$ROS_DISTRO/setup.bash
cd ~/ws_ros2
colcon buildConnect PC and MG400 to the same Ethernet via LAN cable. MG400 needs the emergency stop switch.
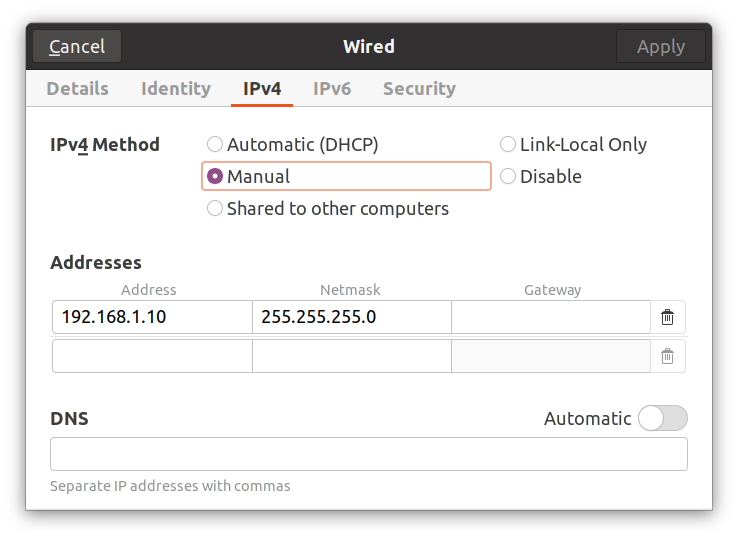
Set the PC's Ethernet IPv4 IP address to a fixed IP somewhere on 192.168.1.0/24 other than 192.168.1.6.
No need to fill in the "Gateway" and "DNS".
Check the circle light on the base of MG400 blink blue.
Before launch MG400 scripts, open new terminal and type followings.
source ~/ws_ros2/install/setup.bashThis command display the robot state with Rviz2. MG400 has parallel links, so the custom joint state publisher is used.
ros2 launch mg400_bringup display.launch.pyThis command will start service server to operate MG400 via ROS2 service.
ros2 launch mg400_bringup main.launch.pyAvailable services are listed here.
Launch main system with other terminal. Allow enough space around the robot as it moves.
./sample.bashros2 run mg400_interface show_realtime_data