This repo is the TensorFlow code for our oral paper in NIPS 2017 (TernGrad: Ternary Gradients to Reduce Communication in Distributed Deep Learning).
The implementations of quantization and de-quantization operators are now available in Caffe2/Pytorch 1.0 (an example). TernGrad is landed into Facebook AI platforms in production to overcome communication bottleneck in large-scale training.
This is a modified copy of TensorFlow inception (with original contributions kept).
In this workspace, inception refers to all types of neural networks in a general way.
Note that there is name abuse because of history reasons. All "bingrad/binary gradient/binarizing" in code comments, help info and filenames essentially refers to "terngrad/ternary gradient/ternarizing". Will update them, but the code is correct and is exactly for terngrad
The code is for algorithm evaluation only, i.e., -1,0,1 are still represented in floating precision. We are hacking TensorFlow/Caffe2 to support encoder/decoder of ternary gradients.
For the interests in accelerating the inference of DNNs (NIPS 2016, ICCV 2017 and ICLR 2018) using sparsity and low rank approximation, the code links are here and there.
Tested stable dependencies:
- python 2.7 (Anaconda)
- Tensorflow v1.0.0 and v1.3.0
- cudnn 5.1.5
- bazel release 0.4.4
Pending to test by python 3.6.1 (Anaconda) and Tensorflow 1.1.0 (installed from python wheel). Known issues (mainly because of update to python 3):
- use
pickleinstead ofcPicklepython package - use
rangeinstead ofxrange - use
dict.itemsinstead ofdict.iteritems TypeError: 'RGB' has type str, but expected one of: bytes: useb'RGB'instead of'RGB'- ...
cd ${TERNGRAD_ROOT}/terngrad
./build_all.sh
cd ${TERNGRAD_ROOT}/slim
# Generate train-mnist.tfrecord and test-mnist.tfrecord
export DATA_PATH="${HOME}/dataset/mnist-data/"
python download_and_convert_data.py --dataset_name mnist --dataset_dir ${DATA_PATH}
cd ${TERNGRAD_ROOT}/slim
# Generate train-cifar10.tfrecord and test-cifar10.tfrecord
export DATA_PATH="${HOME}/dataset/cifar10-data/" # the directory of database
python download_and_convert_data.py --dataset_name cifar10 --dataset_dir ${DATA_PATH}
# Instead of putting all training examples in one tfrecord file, we can split them by enabling --shard
# This is useful for distributed training by date parallelsim, where we should split data across nodes
# Generate train-xxxxx-of-xxxxx (1000 shards in default) and test-00000-of-00001 tfrecord shards
export DATA_PATH="${HOME}/dataset/cifar10-shard-data/" # the directory of database
python download_and_convert_data.py \
--dataset_name cifar10 \
--dataset_dir ${DATA_PATH} \
--shard True
Before generating, RAW_PIXEL=True in ${TERNGRAD_ROOT}/terngrad/inception/data/download_and_preprocess_imagenet.sh can enable storing raw RGB pixels of images into TFRecord.
Storing raw pixels can save JPG decoding time but burden storage read bandwidth. Set RAW_PIXEL=True if high-speed external storage (like SSD) is used but decoder like in CPU cannot feed as fast as training (like in multi-GPUs).
When RAW_PIXEL=True, setting RESIZE_DIMEN to a positive value enables image resizing before writing them to TFRecord files.
# location of where to place the ImageNet data
# If ILSVRC2012_img_train.tar and ILSVRC2012_img_val.tar were downloaded before,
# copy them in ${DATA_DIR} to save time
DATA_DIR=/tmp/
# build the preprocessing script.
bazel build inception/download_and_preprocess_imagenet
# run it
bazel-bin/inception/download_and_preprocess_imagenet "${DATA_DIR}"
cd ${TERNGRAD_ROOT}/terngrad
./run_multi_gpus_cifar10.sh
run_multi_gpus_cifar10.sh is a training script on cifar-10, which
- creates a subfolder under
$ROOT_WORKSPACE/${DATASET_NAME}_xxx/to store the training data (${ROOT_WORKSPACE}/${DATASET_NAME}_training_data/), evaluating data (${ROOT_WORKSPACE}/${DATASET_NAME}_eval_data/) and logs (${ROOT_WORKSPACE}/${DATASET_NAME}_info/). The subfolder name or log filename is similar tocifar10_cifar10_alexnet_24_adam_1_0.0002_2.5_0_0.004_0.9_1_128_2_Tue_Sep_19_15-27-51_EDT_2017. - starts training and
- starts evaluating.
You can change those environments to play.
Use --help to check descriptions for usage of python executables. For example,
bazel-bin/inception/cifar10_train --help
Some important configurations related to TernGrad:
--size_to_binarize SIZE_TO_BINARIZE
The min number of parameters in a Variable (weights/biases) to enable ternarizing this Variable.
1 means ternarizing all. You can use this to exclude some small Variables
--num_gpus NUM_GPUS
How many GPUs to use.
--num_nodes NUM_NODES
How many virtual nodes to use. One GPU can have multiple nodes
This enables emulating N workers in M GPUs, where N > M
This is a good feature to verify TernGrad algorithm when multiple GPUs are unavailable
--grad_bits [32/1]
The number of gradient bits. Either 32 or 1. 32 for floating, and 1 for terngrad
(I know ternary is not 1 bit. This is just an argument to use either floating or terngrad.
We may consider to extend it to more options ranging from terngrad to floating,
like 2 bits, 4 bits, 8 bits, etc)
--clip_factor CLIP_FACTOR
The factor of stddev to clip gradients (0.0 means no clipping).
This is the value of c in gradient clipping technique.
2.5 works well in general
--quantize_logits [True/False]
--noquantize_logits
If quantize the gradients in the last logits layer.
(sometimes, a skew distribution of gradients in last layer may affect the effectiveness of terngrad.
asymmetric ternary levels may be more effective)
More explanations are also covered in run_multi_gpus_cifar10.sh.
More training bash scripts are in terngrad, which have similar arguments.
We provide a single script to remotely launch all workers and parameter servers.
To authorize access to each other, all machines must share the same ssh key. Please follow this tutorial to setup. Moreover, make sure you have added the content in the public key (~/.ssh/id_rsa.pub) to ~/.ssh/authorized_keys. In some systems, you also need to add the public key to ~/.ssh/authorized_keys2. After this, you can simply copy keys (~/.ssh/id_rsa and ~/.ssh/id_rsa.pub) and authorizing files (~/.ssh/authorized_keys and ~/.ssh/authorized_keys2) to all machines.
At the first run, you may need to answer yes to
The authenticity of host '10.236.176.29 (10.236.176.29)' can't be established.
ECDSA key fingerprint is SHA256:jkfjkdslajfklsjaflkjs/jowufuf98e8e8eu9.
Are you sure you want to continue connecting (yes/no)?
Our bash script uses ssh to login and start worker/ps. If some variables are configured in .bashrc and are necessary for training (e.g., the PATH of anaconda), you may need to source ~/.bashrc in ~/.bash_profile or ~/.profile by adding
if [ -f ~/.bashrc ]; then
. ~/.bashrc
fi
In some linux distributions (e.g. ubuntu) you may need to comment
# If not running interactively, don't do anything
case $- in
*i*) ;;
*) return;;
esac
run_dist_cifar10.sh is a toy example by launching one parameter server and two workers in localhost.
Before start, we must split cifar-10 dataset to two parts:
$HOME/dataset/cifar10-data-shard-500-999 and $HOME/dataset/cifar10-data-shard-0-499, which each worker paralell fetches and trains its model replica.
The python executable is bazel-bin/inception/cifar10_distributed_train, of which most arguments are similar to bazel-bin/inception/cifar10_train for multi-gpu mode but with
--job_name JOB_NAME One of "ps", "worker"
--task_id TASK_ID Task ID of the worker/replica running the training.
--ps_hosts PS_HOSTS Comma-separated list of hostname:port for the
parameter server jobs. e.g.
'machine1:2222,machine2:1111,machine2:2222'
--worker_hosts WORKER_HOSTS
Comma-separated list of hostname:port for the worker
jobs. e.g. 'machine1:2222,machine2:1111,machine2:2222'
For more details, type bazel-bin/inception/cifar10_distributed_train --help or go here.
Config config_dist.sh and run run_dist.sh.
You only need to configure config_dist.sh (including workers, ps, gpu devices and dataset paths), and write a WORKER_SCRIPT to specify how to start a worker. run_single_worker_cifarnet.sh and run_single_worker_alexnet.sh are two WORKER_SCRIPT examples, which basically set hyperparameters and start training.
Usage is explained within config_dist.sh script.
By default, results are saved in ${HOME}/tmp/.
We also provide split_dataset.sh to locally split shards of training dataset. Usage: ./split_dataset.sh <path-of-dataset-to-be-split> <total_workers> <worker_index>.
It will create a subfolder under <path-of-dataset-to-be-split> named as worker_<worker_index>_of_<total_workers>, and create links to shard files belonging to this worker.
For example,
$ cd ~/dataset/imagenet-data/
$ ls -l
-rw-rw-r-- 1 wew57 wew57 144582762 Mar 24 2017 train-00000-of-01024
-rw-rw-r-- 1 wew57 wew57 148475588 Mar 24 2017 train-00001-of-01024
-rw-rw-r-- 1 wew57 wew57 150196808 Mar 24 2017 train-00002-of-01024
...
-rw-rw-r-- 1 wew57 wew57 144180160 Mar 24 2017 train-01021-of-01024
-rw-rw-r-- 1 wew57 wew57 140903282 Mar 24 2017 train-01022-of-01024
-rw-rw-r-- 1 wew57 wew57 138485470 Mar 24 2017 train-01023-of-01024
$ cd /home/wew57/github/users/wenwei202/terngrad/terngrad
$ ./split_dataset.sh ~/dataset/imagenet-data/ 16 1
Splitting to /home/wew57/dataset/imagenet-data//worker_1_of_16 ...
$ ls -l /home/wew57/dataset/imagenet-data//worker_1_of_16
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00064-of-01024 -> /home/wew57/dataset/imagenet-data//train-00064-of-01024
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00065-of-01024 -> /home/wew57/dataset/imagenet-data//train-00065-of-01024
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00066-of-01024 -> /home/wew57/dataset/imagenet-data//train-00066-of-01024
...
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00125-of-01024 -> /home/wew57/dataset/imagenet-data//train-00125-of-01024
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00126-of-01024 -> /home/wew57/dataset/imagenet-data//train-00126-of-01024
lrwxrwxrwx 1 wew57 wew57 55 Sep 30 17:30 train-00127-of-01024 -> /home/wew57/dataset/imagenet-data//train-00127-of-01024
You can stop all tasks by stop_dist.sh
Currently, distributed-node mode only supports 32bit gradients. It will take a while to hack the highly-encapsulated SyncReplicasOptimizer to integrate TernGrad. Keep updating.
Bash scripts essentially call python executables. We list python commands here for agile development. Taking 32bit gradients as examples.
Node that, in TernGrad, parameters are allocated in each GPU to reduce communication because we can communicate quantized gradients instead of floating parameters.
By default, the program saves parameters in all GPUs. To evaluate/test, use --tower <gpu_id> to specify which GPU's parameters you want to test on. (We will try to remove this feature to save storage, because the parameter sets are identical across all GPUs). Alteratively, you can use --save_tower 0 in training executables to avoid saving duplicated parameters, in which case, --tower <gpu_id> is unnecessary during evaluation/testing.
cd ${TERNGRAD_ROOT}/terngrad
bazel build inception/mnist_train
bazel build inception/mnist_eval
bazel-bin/inception/mnist_train \
--optimizer momentum \
--initial_learning_rate 0.01 \
--learning_rate_decay_type polynomial \
--max_steps 10000 \
--net lenet \
--image_size 28 \
--num_gpus 2 \
--batch_size 64 \
--train_dir /tmp/mnist_train \
--data_dir ~/dataset/mnist-data/
bazel-bin/inception/mnist_eval \
--data_dir ~/dataset/mnist-data/ \
--net lenet \
--image_size 28 \
--batch_size 100 \
--checkpoint_dir /tmp/mnist_train \
--restore_avg_var True \
--eval_interval_secs 300 \
--eval_dir /tmp/mnist_eval \
--subset test
cd ${TERNGRAD_ROOT}/terngrad
bazel build inception/cifar10_train
bazel build inception/cifar10_eval
bazel-bin/inception/cifar10_train \
--optimizer adam \
--initial_learning_rate 0.0002 \
--num_epochs_per_decay 256 \
--max_steps 200000 \
--net cifar10_alexnet \
--image_size 24 \
--num_gpus 2 \
--batch_size 128 \
--train_dir /tmp/cifar10_train \
--data_dir ~/dataset/cifar10-data/
bazel-bin/inception/cifar10_eval \
--data_dir ~/dataset/cifar10-data/ \
--net cifar10_alexnet \
--image_size 24 \
--batch_size 50 \
--checkpoint_dir /tmp/cifar10_train \
--restore_avg_var True \
--eval_interval_secs 300 \
--eval_dir /tmp/cifar10_eval \
--subset test
cd ${TERNGRAD_ROOT}/terngrad
bazel build inception/imagenet_train
bazel build inception/imagenet_eval
bazel-bin/inception/imagenet_train \
--optimizer momentum \
--net alexnet \
--image_size 224 \
--num_gpus 2 \
--batch_size 256 \
--train_dir /tmp/imagenet_train \
--data_dir ~/dataset/imagenet-data/
bazel-bin/inception/imagenet_eval \
--data_dir ~/dataset/imagenet-data/ \
--net alexnet \
--image_size 224 \
--batch_size 50 \
--checkpoint_dir /tmp/imagenet_train \
--restore_avg_var True \
--eval_dir /tmp/imagenet_eval
- How will TernGrad work with asynchronous SGD
- How to reduce variance of TernGrad when the larger variance introduces some accuracy loss
- How will TernGrad work when server-to-worker gradients are ternarized in the same way
ImageNet is a common academic data set in machine learning for training an image recognition system. Code in this directory demonstrates how to use TensorFlow to train and evaluate a type of convolutional neural network (CNN) on this academic data set. In particular, we demonstrate how to train the Inception v3 architecture as specified in:
Rethinking the Inception Architecture for Computer Vision
Christian Szegedy, Vincent Vanhoucke, Sergey Ioffe, Jonathon Shlens, Zbigniew Wojna
http://arxiv.org/abs/1512.00567
This network achieves 21.2% top-1 and 5.6% top-5 error for single frame evaluation with a computational cost of 5 billion multiply-adds per inference and with using less than 25 million parameters. Below is a visualization of the model architecture.
The code base provides three core binaries for:
- Training an Inception v3 network from scratch across multiple GPUs and/or multiple machines using the ImageNet 2012 Challenge training data set.
- Evaluating an Inception v3 network using the ImageNet 2012 Challenge validation data set.
- Retraining an Inception v3 network on a novel task and back-propagating the errors to fine tune the network weights.
The training procedure employs synchronous stochastic gradient descent across multiple GPUs. The user may specify the number of GPUs they wish harness. The synchronous training performs batch-splitting by dividing a given batch across multiple GPUs.
The training set up is nearly identical to the section [Training a Model Using Multiple GPU Cards] (https://www.tensorflow.org/tutorials/deep_cnn/index.html#training-a-model-using-multiple-gpu-cards) where we have substituted the CIFAR-10 model architecture with Inception v3. The primary differences with that setup are:
- Calculate and update the batch-norm statistics during training so that they may be substituted in during evaluation.
- Specify the model architecture using a (still experimental) higher level language called TensorFlow-Slim.
For more details about TensorFlow-Slim, please see the [Slim README] (inception/slim/README.md). Please note that this higher-level language is still experimental and the API may change over time depending on usage and subsequent research.
NOTE Before doing anything, we first need to build TensorFlow from source, and installed as a PIP package. Please follow the instructions at [Installing From Source] (https://www.tensorflow.org/get_started/os_setup.html#create-the-pip-package-and-install).
Before you run the training script for the first time, you will need to download
and convert the ImageNet data to native TFRecord format. The TFRecord format
consists of a set of sharded files where each entry is a serialized tf.Example
proto. Each tf.Example proto contains the ImageNet image (JPEG encoded) as
well as metadata such as label and bounding box information. See
parse_example_proto for details.
We provide a single script for downloading and converting ImageNet data to TFRecord format. Downloading and preprocessing the data may take several hours (up to half a day) depending on your network and computer speed. Please be patient.
To begin, you will need to sign up for an account with [ImageNet] (http://image-net.org) to gain access to the data. Look for the sign up page, create an account and request an access key to download the data.
After you have USERNAME and PASSWORD, you are ready to run our script. Make
sure that your hard disk has at least 500 GB of free space for downloading and
storing the data. Here we select DATA_DIR=$HOME/dataset/imagenet-data as such a
location but feel free to edit accordingly.
When you run the below script, please enter USERNAME and PASSWORD when prompted. This will occur at the very beginning. Once these values are entered, you will not need to interact with the script again.
# location of where to place the ImageNet data
DATA_DIR=$HOME/dataset/imagenet-data
# build the preprocessing script.
bazel build inception/download_and_preprocess_imagenet
# run it
bazel-bin/inception/download_and_preprocess_imagenet "${DATA_DIR}"The final line of the output script should read:
2016-02-17 14:30:17.287989: Finished writing all 1281167 images in data set.When the script finishes you will find 1024 and 128 training and validation
files in the DATA_DIR. The files will match the patterns train-????-of-1024
and validation-?????-of-00128, respectively.
Congratulations! You are now ready to train or evaluate with the ImageNet data set.
WARNING Training an Inception v3 network from scratch is a computationally intensive task and depending on your compute setup may take several days or even weeks.
Before proceeding please read the [Convolutional Neural Networks] (https://www.tensorflow.org/tutorials/deep_cnn/index.html) tutorial in particular focus on [Training a Model Using Multiple GPU Cards] (https://www.tensorflow.org/tutorials/deep_cnn/index.html#training-a-model-using-multiple-gpu-cards) . The model training method is nearly identical to that described in the CIFAR-10 multi-GPU model training. Briefly, the model training
- Places an individual model replica on each GPU. Split the batch across the GPUs.
- Updates model parameters synchronously by waiting for all GPUs to finish processing a batch of data.
The training procedure is encapsulated by this diagram of how operations and variables are placed on CPU and GPUs respectively.
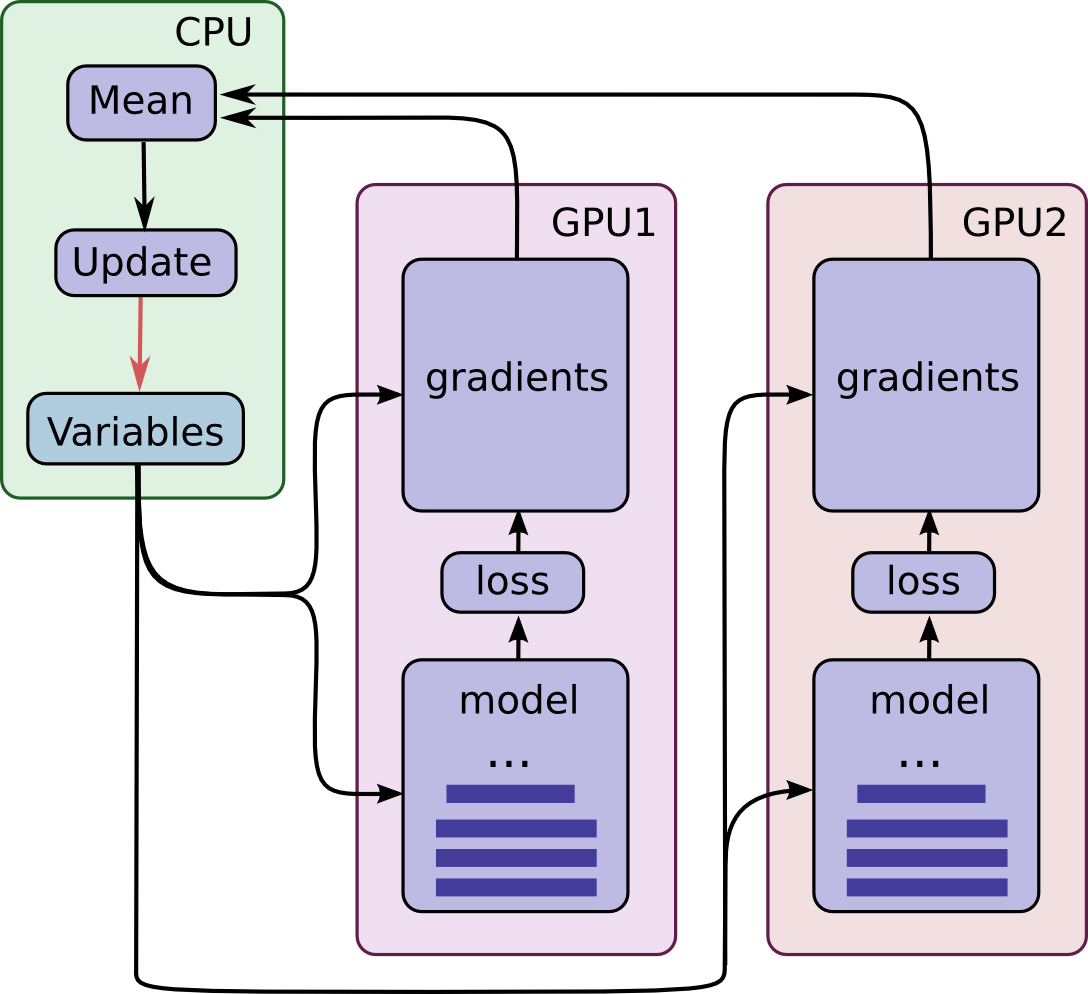
Each tower computes the gradients for a portion of the batch and the gradients are combined and averaged across the multiple towers in order to provide a single update of the Variables stored on the CPU.
A crucial aspect of training a network of this size is training speed in terms of wall-clock time. The training speed is dictated by many factors -- most importantly the batch size and the learning rate schedule. Both of these parameters are heavily coupled to the hardware set up.
Generally speaking, a batch size is a difficult parameter to tune as it requires balancing memory demands of the model, memory available on the GPU and speed of computation. Generally speaking, employing larger batch sizes leads to more efficient computation and potentially more efficient training steps.
We have tested several hardware setups for training this model from scratch but we emphasize that depending your hardware set up, you may need to adapt the batch size and learning rate schedule.
Please see the comments in inception_train.py for a few selected learning rate
plans based on some selected hardware setups.
To train this model, you simply need to specify the following:
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/imagenet_train
# run it
bazel-bin/inception/imagenet_train --num_gpus=1 --batch_size=32 --train_dir=/tmp/imagenet_train --data_dir=/tmp/imagenet_dataThe model reads in the ImageNet training data from --data_dir. If you followed
the instructions in Getting Started, then set
--data_dir="${DATA_DIR}". The script assumes that there exists a set of
sharded TFRecord files containing the ImageNet data. If you have not created
TFRecord files, please refer to Getting Started
Here is the output of the above command line when running on a Tesla K40c:
2016-03-07 12:24:59.922898: step 0, loss = 13.11 (5.3 examples/sec; 6.064 sec/batch)
2016-03-07 12:25:55.206783: step 10, loss = 13.71 (9.4 examples/sec; 3.394 sec/batch)
2016-03-07 12:26:28.905231: step 20, loss = 14.81 (9.5 examples/sec; 3.380 sec/batch)
2016-03-07 12:27:02.699719: step 30, loss = 14.45 (9.5 examples/sec; 3.378 sec/batch)
2016-03-07 12:27:36.515699: step 40, loss = 13.98 (9.5 examples/sec; 3.376 sec/batch)
2016-03-07 12:28:10.220956: step 50, loss = 13.92 (9.6 examples/sec; 3.327 sec/batch)
2016-03-07 12:28:43.658223: step 60, loss = 13.28 (9.6 examples/sec; 3.350 sec/batch)
...In this example, a log entry is printed every 10 step and the line includes the total loss (starts around 13.0-14.0) and the speed of processing in terms of throughput (examples / sec) and batch speed (sec/batch).
The number of GPU devices is specified by --num_gpus (which defaults to 1).
Specifying --num_gpus greater then 1 splits the batch evenly split across the
GPU cards.
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/imagenet_train
# run it
bazel-bin/inception/imagenet_train --num_gpus=2 --batch_size=64 --train_dir=/tmp/imagenet_trainThis model splits the batch of 64 images across 2 GPUs and calculates the average gradient by waiting for both GPUs to finish calculating the gradients from their respective data (See diagram above). Generally speaking, using larger numbers of GPUs leads to higher throughput as well as the opportunity to use larger batch sizes. In turn, larger batch sizes imply better estimates of the gradient enabling the usage of higher learning rates. In summary, using more GPUs results in simply faster training speed.
Note that selecting a batch size is a difficult parameter to tune as it requires balancing memory demands of the model, memory available on the GPU and speed of computation. Generally speaking, employing larger batch sizes leads to more efficient computation and potentially more efficient training steps.
Note that there is considerable noise in the loss function on individual steps in the previous log. Because of this noise, it is difficult to discern how well a model is learning. The solution to the last problem is to launch TensorBoard pointing to the directory containing the events log.
tensorboard --logdir=/tmp/imagenet_trainTensorBoard has access to the many Summaries produced by the model that describe multitudes of statistics tracking the model behavior and the quality of the learned model. In particular, TensorBoard tracks a exponentially smoothed version of the loss. In practice, it is far easier to judge how well a model learns by monitoring the smoothed version of the loss.
NOTE Distributed TensorFlow requires version 0.8 or later.
Distributed TensorFlow lets us use multiple machines to train a model faster. This is quite different from the training with multiple GPU towers on a single machine where all parameters and gradients computation are in the same place. We coordinate the computation across multiple machines by employing a centralized repository for parameters that maintains a unified, single copy of model parameters. Each individual machine sends gradient updates to the centralized parameter repository which coordinates these updates and sends back updated parameters to the individual machines running the model training.
We term each machine that runs a copy of the training a worker or replica.
We term each machine that maintains model parameters a ps, short for
parameter server. Note that we might have more than one machine acting as a
ps as the model parameters may be sharded across multiple machines.
Variables may be updated with synchronous or asynchronous gradient updates. One
may construct a an [Optimizer]
(https://www.tensorflow.org/api_docs/python/train.html#optimizers) in TensorFlow
that constructs the necessary graph for either case diagrammed below from
TensorFlow [Whitepaper]
(http://download.tensorflow.org/paper/whitepaper2015.pdf):
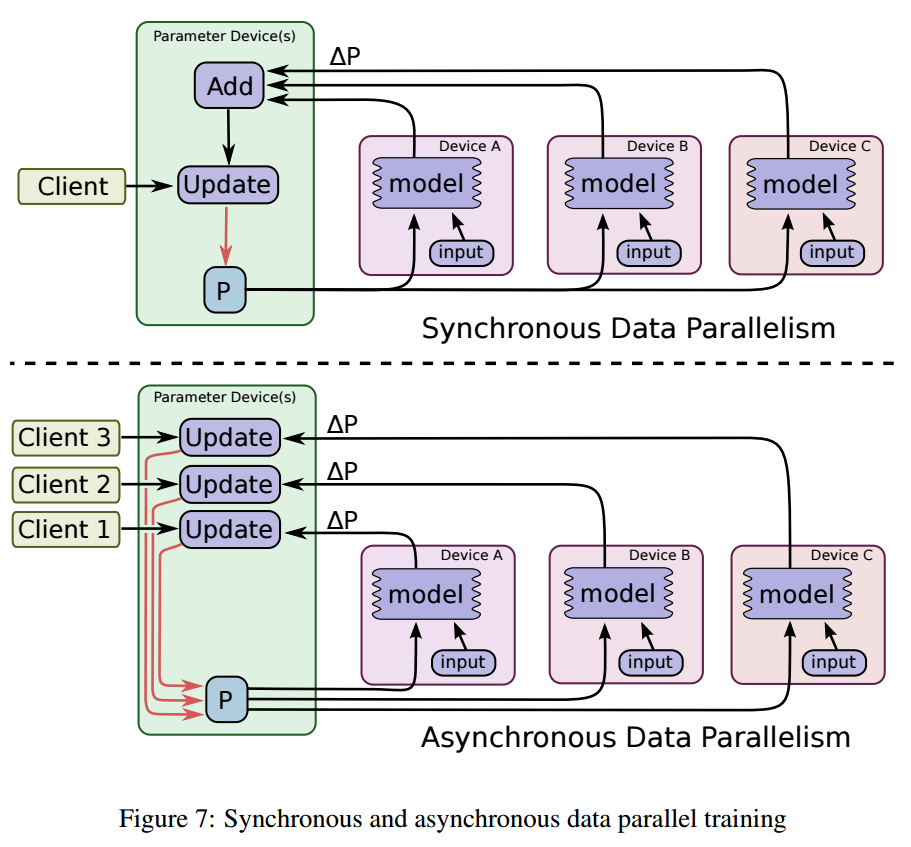
In a recent paper, synchronous gradient updates have demonstrated to reach higher accuracy in a shorter amount of time. In this distributed Inception example we employ synchronous gradient updates.
Note that in this example each replica has a single tower that uses one GPU.
The command-line flags worker_hosts and ps_hosts specify available servers.
The same binary will be used for both the worker jobs and the ps jobs.
Command line flag job_name will be used to specify what role a task will be
playing and task_id will be used to idenify which one of the jobs it is
running. Several things to note here:
- The numbers of
psandworkertasks are inferred from the lists of hosts specified in the flags. Thetask_idshould be within the range[0, num_ps_tasks)forpstasks and[0, num_worker_tasks)forworkertasks. psandworkertasks can run on the same machine, as long as that machine has sufficient resources to handle both tasks. Note that thepstask does not benefit from a GPU, so it should not attempt to use one (see below).- Multiple
workertasks can run on the same machine with multiple GPUs so machine_A with 2 GPUs may have 2 workers while machine_B with 1 GPU just has 1 worker. - The default learning rate schedule works well for a wide range of number of replicas [25, 50, 100] but feel free to tune it for even better results.
- The command line of both
psandworkertasks should include the complete list ofps_hostsandworker_hosts. - There is a chief
workeramong all workers which defaults toworker0. The chief will be in charge of initializing all the parameters, writing out the summaries and the checkpoint. The checkpoint and summary will be in thetrain_dirof the host forworker0. - Each worker processes a batch_size number of examples but each gradient update is computed from all replicas. Hence, the effective batch size of this model is batch_size * num_workers.
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/imagenet_distributed_train
# To start worker 0, go to the worker0 host and run the following (Note that
# task_id should be in the range [0, num_worker_tasks):
bazel-bin/inception/imagenet_distributed_train \
--batch_size=32 \
--data_dir=$HOME/imagenet-data \
--job_name='worker' \
--task_id=0 \
--ps_hosts='ps0.example.com:2222' \
--worker_hosts='worker0.example.com:2222,worker1.example.com:2222'
# To start worker 1, go to the worker1 host and run the following (Note that
# task_id should be in the range [0, num_worker_tasks):
bazel-bin/inception/imagenet_distributed_train \
--batch_size=32 \
--data_dir=$HOME/imagenet-data \
--job_name='worker' \
--task_id=1 \
--ps_hosts='ps0.example.com:2222' \
--worker_hosts='worker0.example.com:2222,worker1.example.com:2222'
# To start the parameter server (ps), go to the ps host and run the following (Note
# that task_id should be in the range [0, num_ps_tasks):
bazel-bin/inception/imagenet_distributed_train \
--job_name='ps' \
--task_id=0 \
--ps_hosts='ps0.example.com:2222' \
--worker_hosts='worker0.example.com:2222,worker1.example.com:2222'If you have installed a GPU-compatible version of TensorFlow, the ps will also
try to allocate GPU memory although it is not helpful. This could potentially
crash the worker on the same machine as it has little to no GPU memory to
allocate. To avoid this, you can prepend the previous command to start ps
with: CUDA_VISIBLE_DEVICES=''
CUDA_VISIBLE_DEVICES='' bazel-bin/inception/imagenet_distributed_train \
--job_name='ps' \
--task_id=0 \
--ps_hosts='ps0.example.com:2222' \
--worker_hosts='worker0.example.com:2222,worker1.example.com:2222'If you have run everything correctly, you should see a log in each worker job
that looks like the following. Note the training speed varies depending on your
hardware and the first several steps could take much longer.
INFO:tensorflow:PS hosts are: ['ps0.example.com:2222', 'ps1.example.com:2222']
INFO:tensorflow:Worker hosts are: ['worker0.example.com:2222', 'worker1.example.com:2222']
I tensorflow/core/distributed_runtime/rpc/grpc_channel.cc:206] Initialize HostPortsGrpcChannelCache for job ps -> {ps0.example.com:2222, ps1.example.com:2222}
I tensorflow/core/distributed_runtime/rpc/grpc_channel.cc:206] Initialize HostPortsGrpcChannelCache for job worker -> {localhost:2222, worker1.example.com:2222}
I tensorflow/core/distributed_runtime/rpc/grpc_server_lib.cc:202] Started server with target: grpc://localhost:2222
INFO:tensorflow:Created variable global_step:0 with shape () and init <function zeros_initializer at 0x7f6aa014b140>
...
INFO:tensorflow:Created variable logits/logits/biases:0 with shape (1001,) and init <function _initializer at 0x7f6a77f3cf50>
INFO:tensorflow:SyncReplicas enabled: replicas_to_aggregate=2; total_num_replicas=2
INFO:tensorflow:2016-04-13 01:56:26.405639 Supervisor
INFO:tensorflow:Started 2 queues for processing input data.
INFO:tensorflow:global_step/sec: 0
INFO:tensorflow:Worker 0: 2016-04-13 01:58:40.342404: step 0, loss = 12.97(0.0 examples/sec; 65.428 sec/batch)
INFO:tensorflow:global_step/sec: 0.0172907
...and a log in each ps job that looks like the following:
INFO:tensorflow:PS hosts are: ['ps0.example.com:2222', 'ps1.example.com:2222']
INFO:tensorflow:Worker hosts are: ['worker0.example.com:2222', 'worker1.example.com:2222']
I tensorflow/core/distributed_runtime/rpc/grpc_channel.cc:206] Initialize HostPortsGrpcChannelCache for job ps -> {localhost:2222, ps1.example.com:2222}
I tensorflow/core/distributed_runtime/rpc/grpc_channel.cc:206] Initialize HostPortsGrpcChannelCache for job worker -> {worker0.example.com:2222, worker1.example.com:2222}
I tensorflow/core/distributed_runtime/rpc/grpc_server_lib.cc:202] Started server with target: grpc://localhost:2222Congratulations! You are now training Inception in a distributed manner.
Evaluating an Inception v3 model on the ImageNet 2012 validation data set requires running a separate binary.
The evaluation procedure is nearly identical to [Evaluating a Model] (https://www.tensorflow.org/tutorials/deep_cnn/index.html#evaluating-a-model) described in the [Convolutional Neural Network] (https://www.tensorflow.org/tutorials/deep_cnn/index.html) tutorial.
WARNING Be careful not to run the evaluation and training binary on the same GPU or else you might run out of memory. Consider running the evaluation on a separate GPU if available or suspending the training binary while running the evaluation on the same GPU.
Briefly, one can evaluate the model by running:
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/imagenet_eval
# run it
bazel-bin/inception/imagenet_eval --checkpoint_dir=/tmp/imagenet_train --eval_dir=/tmp/imagenet_evalNote that we point --checkpoint_dir to the location of the checkpoints saved
by inception_train.py above. Running the above command results in the
following output:
2016-02-17 22:32:50.391206: precision @ 1 = 0.735
...The script calculates the precision @ 1 over the entire validation data
periodically. The precision @ 1 measures the how often the highest scoring
prediction from the model matched the ImageNet label -- in this case, 73.5%. If
you wish to run the eval just once and not periodically, append the --run_once
option.
Much like the training script, imagenet_eval.py also exports summaries that
may be visualized in TensorBoard. These summaries calculate additional
statistics on the predictions (e.g. recall @ 5) as well as monitor the
statistics of the model activations and weights during evaluation.
Much like training the ImageNet model we must first convert a new data set to
the sharded TFRecord format which each entry is a serialized tf.Example proto.
We have provided a script demonstrating how to do this for small data set of of a few thousand flower images spread across 5 labels:
daisy, dandelion, roses, sunflowers, tulipsThere is a single automated script that downloads the data set and converts it
to the TFRecord format. Much like the ImageNet data set, each record in the
TFRecord format is a serialized tf.Example proto whose entries include a
JPEG-encoded string and an integer label. Please see [parse_example_proto]
(inception/image_processing.py) for details.
The script just takes a few minutes to run depending your network connection
speed for downloading and processing the images. Your hard disk requires 200MB
of free storage. Here we select DATA_DIR=$HOME/flowers-data as such a location
but feel free to edit accordingly.
# location of where to place the flowers data
FLOWERS_DATA_DIR=$HOME/flowers-data
# build the preprocessing script.
bazel build inception/download_and_preprocess_flowers
# run it
bazel-bin/inception/download_and_preprocess_flowers "${FLOWERS_DATA_DIR}"If the script runs successfully, the final line of the terminal output should look like:
2016-02-24 20:42:25.067551: Finished writing all 3170 images in data set.When the script finishes you will find 2 shards for the training and validation
files in the DATA_DIR. The files will match the patterns train-????-of-00001
and validation-?????-of-00001, respectively.
NOTE If you wish to prepare a custom image data set for transfer learning,
you will need to invoke build_image_data.py on
your custom data set. Please see the associated options and assumptions behind
this script by reading the comments section of [build_image_data.py]
(inception/data/build_image_data.py). Also, if your custom data has a different
number of examples or classes, you need to change the appropriate values in
imagenet_data.py.
The second piece you will need is a trained Inception v3 image model. You have the option of either training one yourself (See [How to Train from Scratch] (#how-to-train-from-scratch) for details) or you can download a pre-trained model like so:
# location of where to place the Inception v3 model
DATA_DIR=$HOME/inception-v3-model
cd ${DATA_DIR}
# download the Inception v3 model
curl -O http://download.tensorflow.org/models/image/imagenet/inception-v3-2016-03-01.tar.gz
tar xzf inception-v3-2016-03-01.tar.gz
# this will create a directory called inception-v3 which contains the following files.
> ls inception-v3
README.txt
checkpoint
model.ckpt-157585Congratulations! You are now ready to fine-tune your pre-trained Inception v3 model with the flower data set.
We are now ready to fine-tune a pre-trained Inception-v3 model on the flowers data set. This requires two distinct changes to our training procedure:
-
Build the exact same model as previously except we change the number of labels in the final classification layer.
-
Restore all weights from the pre-trained Inception-v3 except for the final classification layer; this will get randomly initialized instead.
We can perform these two operations by specifying two flags:
--pretrained_model_checkpoint_path and --fine_tune. The first flag is a
string that points to the path of a pre-trained Inception-v3 model. If this flag
is specified, it will load the entire model from the checkpoint before the
script begins training.
The second flag --fine_tune is a boolean that indicates whether the last
classification layer should be randomly initialized or restored. You may set
this flag to false if you wish to continue training a pre-trained model from a
checkpoint. If you set this flag to true, you can train a new classification
layer from scratch.
In order to understand how --fine_tune works, please see the discussion on
Variables in the TensorFlow-Slim README.md.
Putting this all together you can retrain a pre-trained Inception-v3 model on the flowers data set with the following command.
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/flowers_train
# Path to the downloaded Inception-v3 model.
MODEL_PATH="${INCEPTION_MODEL_DIR}/model.ckpt-157585"
# Directory where the flowers data resides.
FLOWERS_DATA_DIR=/tmp/flowers-data/
# Directory where to save the checkpoint and events files.
TRAIN_DIR=/tmp/flowers_train/
# Run the fine-tuning on the flowers data set starting from the pre-trained
# Imagenet-v3 model.
bazel-bin/inception/flowers_train \
--train_dir="${TRAIN_DIR}" \
--data_dir="${FLOWERS_DATA_DIR}" \
--pretrained_model_checkpoint_path="${MODEL_PATH}" \
--fine_tune=True \
--initial_learning_rate=0.001 \
--input_queue_memory_factor=1We have added a few extra options to the training procedure.
- Fine-tuning a model a separate data set requires significantly lowering the initial learning rate. We set the initial learning rate to 0.001.
- The flowers data set is quite small so we shrink the size of the shuffling queue of examples. See Adjusting Memory Demands for more details.
The training script will only reports the loss. To evaluate the quality of the
fine-tuned model, you will need to run flowers_eval:
# Build the model. Note that we need to make sure the TensorFlow is ready to
# use before this as this command will not build TensorFlow.
bazel build inception/flowers_eval
# Directory where we saved the fine-tuned checkpoint and events files.
TRAIN_DIR=/tmp/flowers_train/
# Directory where the flowers data resides.
FLOWERS_DATA_DIR=/tmp/flowers-data/
# Directory where to save the evaluation events files.
EVAL_DIR=/tmp/flowers_eval/
# Evaluate the fine-tuned model on a hold-out of the flower data set.
bazel-bin/inception/flowers_eval \
--eval_dir="${EVAL_DIR}" \
--data_dir="${FLOWERS_DATA_DIR}" \
--subset=validation \
--num_examples=500 \
--checkpoint_dir="${TRAIN_DIR}" \
--input_queue_memory_factor=1 \
--run_onceWe find that the evaluation arrives at roughly 93.4% precision@1 after the model has been running for 2000 steps.
Succesfully loaded model from /tmp/flowers/model.ckpt-1999 at step=1999.
2016-03-01 16:52:51.761219: starting evaluation on (validation).
2016-03-01 16:53:05.450419: [20 batches out of 20] (36.5 examples/sec; 0.684sec/batch)
2016-03-01 16:53:05.450471: precision @ 1 = 0.9340 recall @ 5 = 0.9960 [500 examples]One can use the existing scripts supplied with this model to build a new dataset
for training or fine-tuning. The main script to employ is
build_image_data.py. Briefly, this script takes a
structured directory of images and converts it to a sharded TFRecord that can
be read by the Inception model.
In particular, you will need to create a directory of training images that
reside within $TRAIN_DIR and $VALIDATION_DIR arranged as such:
$TRAIN_DIR/dog/image0.jpeg
$TRAIN_DIR/dog/image1.jpg
$TRAIN_DIR/dog/image2.png
...
$TRAIN_DIR/cat/weird-image.jpeg
$TRAIN_DIR/cat/my-image.jpeg
$TRAIN_DIR/cat/my-image.JPG
...
$VALIDATION_DIR/dog/imageA.jpeg
$VALIDATION_DIR/dog/imageB.jpg
$VALIDATION_DIR/dog/imageC.png
...
$VALIDATION_DIR/cat/weird-image.PNG
$VALIDATION_DIR/cat/that-image.jpg
$VALIDATION_DIR/cat/cat.JPG
...Each sub-directory in $TRAIN_DIR and $VALIDATION_DIR corresponds to a unique
label for the images that reside within that sub-directory. The images may be
JPEG or PNG images. We do not support other images types currently.
Once the data is arranged in this directory structure, we can run
build_image_data.py on the data to generate the sharded TFRecord dataset.
Each entry of the TFRecord is a serialized tf.Example protocol buffer. A
complete list of information contained in the tf.Example is described in the
comments of build_image_data.py.
To run build_image_data.py, you can run the following command line:
# location to where to save the TFRecord data.
OUTPUT_DIRECTORY=$HOME/my-custom-data/
# build the preprocessing script.
bazel build inception/build_image_data
# convert the data.
bazel-bin/inception/build_image_data \
--train_directory="${TRAIN_DIR}" \
--validation_directory="${VALIDATION_DIR}" \
--output_directory="${OUTPUT_DIRECTORY}" \
--labels_file="${LABELS_FILE}" \
--train_shards=128 \
--validation_shards=24 \
--num_threads=8where the $OUTPUT_DIRECTORY is the location of the sharded TFRecords. The
$LABELS_FILE will be a text file that is read by the script that provides
a list of all of the labels. For instance, in the case flowers data set, the
$LABELS_FILE contained the following data:
daisy
dandelion
roses
sunflowers
tulipsNote that each row of each label corresponds with the entry in the final
classifier in the model. That is, the daisy corresponds to the classifier for
entry 1; dandelion is entry 2, etc. We skip label 0 as a background
class.
After running this script produces files that look like the following:
$TRAIN_DIR/train-00000-of-00024
$TRAIN_DIR/train-00001-of-00024
...
$TRAIN_DIR/train-00023-of-00024
and
$VALIDATION_DIR/validation-00000-of-00008
$VALIDATION_DIR/validation-00001-of-00008
...
$VALIDATION_DIR/validation-00007-of-00008where 24 and 8 are the number of shards specified for each dataset, respectively. Generally speaking, we aim for selecting the number of shards such that roughly 1024 images reside in each shard. Once this data set is built, you are ready to train or fine-tune an Inception model on this data set.
Note, if you are piggy backing on the flowers retraining scripts, be sure to
update num_classes() and num_examples_per_epoch() in flowers_data.py
to correspond with your data.
The model architecture and training procedure is heavily dependent on the hardware used to train the model. If you wish to train or fine-tune this model on your machine you will need to adjust and empirically determine a good set of training hyper-parameters for your setup. What follows are some general considerations for novices.
Roughly 5-10 hyper-parameters govern the speed at which a network is trained. In
addition to --batch_size and --num_gpus, there are several constants defined
in inception_train.py which dictate the learning
schedule.
RMSPROP_DECAY = 0.9 # Decay term for RMSProp.
MOMENTUM = 0.9 # Momentum in RMSProp.
RMSPROP_EPSILON = 1.0 # Epsilon term for RMSProp.
INITIAL_LEARNING_RATE = 0.1 # Initial learning rate.
NUM_EPOCHS_PER_DECAY = 30.0 # Epochs after which learning rate decays.
LEARNING_RATE_DECAY_FACTOR = 0.16 # Learning rate decay factor.There are many papers that discuss the various tricks and trade-offs associated with training a model with stochastic gradient descent. For those new to the field, some great references are:
- Y Bengio, Practical recommendations for gradient-based training of deep architectures
- I Goodfellow, Y Bengio and A Courville, [Deep Learning] (http://www.deeplearningbook.org/)
What follows is a summary of some general advice for identifying appropriate model hyper-parameters in the context of this particular model training setup. Namely, this library provides synchronous updates to model parameters based on batch-splitting the model across multiple GPUs.
-
Higher learning rates leads to faster training. Too high of learning rate leads to instability and will cause model parameters to diverge to infinity or NaN.
-
Larger batch sizes lead to higher quality estimates of the gradient and permit training the model with higher learning rates.
-
Often the GPU memory is a bottleneck that prevents employing larger batch sizes. Employing more GPUs allows one to user larger batch sizes because this model splits the batch across the GPUs.
NOTE If one wishes to train this model with asynchronous gradient updates, one will need to substantially alter this model and new considerations need to be factored into hyperparameter tuning. See Large Scale Distributed Deep Networks for a discussion in this domain.
Training this model has large memory demands in terms of the CPU and GPU. Let's discuss each item in turn.
GPU memory is relatively small compared to CPU memory. Two items dictate the amount of GPU memory employed -- model architecture and batch size. Assuming that you keep the model architecture fixed, the sole parameter governing the GPU demand is the batch size. A good rule of thumb is to try employ as large of batch size as will fit on the GPU.
If you run out of GPU memory, either lower the --batch_size or employ more
GPUs on your desktop. The model performs batch-splitting across GPUs, thus N
GPUs can handle N times the batch size of 1 GPU.
The model requires a large amount of CPU memory as well. We have tuned the model to employ about ~20GB of CPU memory. Thus, having access to about 40 GB of CPU memory would be ideal.
If that is not possible, you can tune down the memory demands of the model via
lowering --input_queue_memory_factor. Images are preprocessed asynchronously
with respect to the main training across --num_preprocess_threads threads. The
preprocessed images are stored in shuffling queue in which each GPU performs a
dequeue operation in order to receive a batch_size worth of images.
In order to guarantee good shuffling across the data, we maintain a large
shuffling queue of 1024 x input_queue_memory_factor images. For the current
model architecture, this corresponds to about 4GB of CPU memory. You may lower
input_queue_memory_factor in order to decrease the memory footprint. Keep in
mind though that lowering this value drastically may result in a model with
slightly lower predictive accuracy when training from scratch. Please see
comments in image_processing.py for more details.
In lieu of buying more CPU memory, an easy fix is to decrease
--input_queue_memory_factor. See [Adjusting Memory Demands]
(#adjusting-memory-demands).
The data is not able to fit on the GPU card. The simplest solution is to
decrease the batch size of the model. Otherwise, you will need to think about a
more sophisticated method for specifying the training which cuts up the model
across multiple session.run() calls or partitions the model across multiple
GPUs. See Using GPUs
and Adjusting Memory Demands for more information.
The learning rate of the model is too high. Turn down your learning rate.
The simplest solution is to artificially resize your images to 299x299 pixels.
See Images section for
many resizing, cropping and padding methods. Note that the entire model
architecture is predicated on a 299x299 image, thus if you wish to change the
input image size, then you may need to redesign the entire model architecture.
We targeted a desktop with 128GB of CPU ram connected to 8 NVIDIA Tesla K40 GPU
cards but we have run this on desktops with 32GB of CPU ram and 1 NVIDIA Tesla
K40. You can get a sense of the various training configurations we tested by
reading the comments in inception_train.py.
You only need to make sure that the checkpoint is in a location that can be
reached by all of the ps tasks. By specifying the checkpoint location with
--train_dir , the ps servers will load the checkpoint before commencing
training.