Unity script which acts as controller for Unity ArticulationBody robotics arms for a ROS moveit instance. This C# script can be used to use Unity as simulator for ROS. It follows the examples from https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/pick_and_place/3_pick_and_place.md but tries to generify the creation of the state publishing and joint actuation.
The script does two things:
- It streams the joint state of the arm to ROS
- It receives ROS trajectories and actuates the joints of an articulated arm using ArticulationBody
It requires Unity version >= 2020.05f
A convenient way to use this component is joint with https://github.com/szandara/unity_moveit_manager to stream the trajectories from MoveIt! direclty to Unity. The C# script should be added to the Unity scene and configured to point to the base of an articulated arm. Only articulated arms are supported.
First install in Unity the following packages using the Package Manager
https://github.com/Unity-Technologies/ROS-TCP-Connector.git#v0.1.2
https://github.com/Unity-Technologies/URDF-Importer.git#v0.1.2
Then paste the content of the C# script into your assets and make sure it compiles.
Here we setup a script to control Unity's ArticulationBody objects with MoveIt! messages from ROS. I have uploaded the script in this repository https://github.com/szandara/unity_moveit_connector/blob/master/Editor/ROSMoveItControllerGeneric.cs
-
Copy paste the content of the file directly into a file named Assets/moveit/ROSMoveItControllerGeneric.cs make sure Unity compiles it without errors.
-
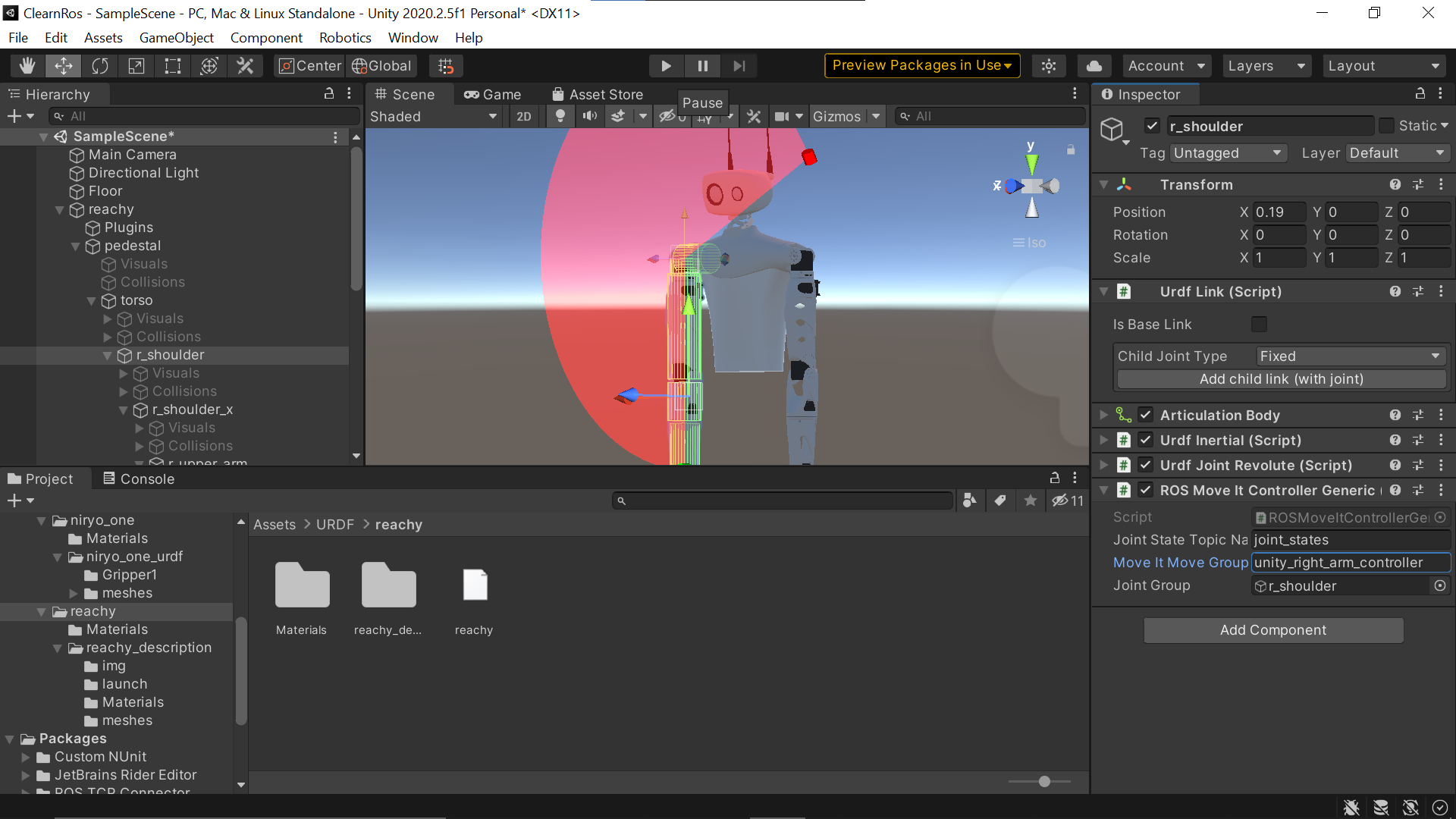
Finally, add the script to Reachy by selecting r_shoulder then Add Component -> Scripts -> ROS Move It Controller Generic
-
Add the parameters as seen in this example
- Joint State Topic Name: joint_states
- Move It Move Group: unity_right_arm_controller
- Joint Group: Drag and Drop the r_shoulder joint from the Unity tree as visible in this screenshot.
See full tutorial: https://dev.to/szandara/robotics-on-wsl2-using-ros-docker-and-unity-3d-part-i-3752