PlanManager: Increase Timeouts for Mission Transfer #12184
Conversation
src/MissionManager/PlanManager.h
Outdated
| @@ -68,9 +68,9 @@ class PlanManager : public QObject | |||
|
|
|||
| // These values are public so the unit test can set appropriate signal wait times | |||
| // When passively waiting for a mission process, use a longer timeout. | |||
| static const int _ackTimeoutMilliseconds = 1500; | |||
| static const int _ackTimeoutMilliseconds = 2500; | |||
There was a problem hiding this comment.
This seems super long. This would only take affect on things like a go to location command. Are you sure this is needed? For mission download only the retry timeout comes into play.
There was a problem hiding this comment.
Correct, the retry timeout was causing the issues on initial connect and mission download from vehicle to ground station.
The regular timeout hits when uploading a mission from ground station to the vehicle.
I'm not familiar with the sequence but there seems to be the situation where the vehicle should ask the ground station for the mission items and this ends up in this error.
_sendError(ProtocolError, tr("Vehicle did not request all items from ground station: %1").arg(_ackTypeToString(_expectedAck)));
https://github.com/mavlink/qgroundcontrol/blob/master/src/MissionManager/PlanManager.cc#L220
I'll attach a log once I figure out why I don't get any logging if I build Release Goal.
There was a problem hiding this comment.
I had to build in debug goal to get logging again. This is the section when uploading mission to vehicle without touching the regular timeout.
PlanMasterControllerLog: PlanMasterController::sendToVehicle start mission sendToVehicle
MissionControllerLog: MissionControllerLog::sendToVehicle
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 0 0 "Mission Start"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 1 1 "Takeoff"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 2 2 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 3 3 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 4 4 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 5 5 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 6 8 "Landing Pattern"
PlanManagerLog: "writeMissionItems T:Mission count:" 9
PlanManagerLog: _setTransactionInProgress "T:Mission" 2
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 0
PlanManagerLog: "Retrying T:Mission MISSION_COUNT retry Count" 1
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 1
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 0 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 0 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 1
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 1 22
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 2
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 2 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 2
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 2
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 2 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 3
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 3 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 3
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 3
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 3 16
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 4
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 4 16
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 4
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 4
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 4 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 5
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 5 16
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 5
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 5
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 5 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 6
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 6 189
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 7
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 7 31
PlanManagerLog: "Sending error - _planTypeString(T:Mission) errorCode(2) errorMsg(Vehicle did not request all items from ground station: MISSION_REQUEST)"
PlanManagerLog: _setTransactionInProgress "T:Mission" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start GeoFence sendToVehicle
PlanManagerLog: "writeMissionItems T:GeoFence count:" 0
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 2
PlanManagerLog: "_writeMissionCount T:GeoFence count:_retryCount" 0 0
PlanManagerLog: "_handleMissionRequest T:GeoFence Incorrect mission_type received expected:actual" 1 0
PlanManagerLog: "_handleMissionRequest T:GeoFence Incorrect mission_type received expected:actual" 1 0
PlanManagerLog: "_handleMissionAck T:GeoFence type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:GeoFence"
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start rally sendToVehicle
PlanManagerLog: "writeMissionItems T:Rally count:" 0
PlanManagerLog: _setTransactionInProgress "T:Rally" 2
PlanManagerLog: "_writeMissionCount T:Rally count:_retryCount" 0 0
PlanManagerLog: "_handleMissionAck T:Rally type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:Rally"
PlanManagerLog: _setTransactionInProgress "T:Rally" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle start mission sendToVehicle
MissionControllerLog: MissionControllerLog::sendToVehicle
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 0 0 "Mission Start"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 1 1 "Takeoff"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 2 2 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 3 3 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 4 4 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 5 5 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 6 8 "Landing Pattern"
PlanManagerLog: "writeMissionItems T:Mission count:" 9
PlanManagerLog: _setTransactionInProgress "T:Mission" 2
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 8
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 8 21
PlanManagerLog: "Fell off end of switch statement T:Mission 15"
PlanManagerLog: "_handleMissionAck T:Mission type:" "Unknown error: 15. Item #8 Command: Land"
PlanManagerLog: "Fell off end of switch statement T:Mission 15"
PlanManagerLog: "Sending error - _planTypeString(T:Mission) errorCode(5) errorMsg(Unknown error: 15. Item #8 Command: Land)"
PlanManagerLog: _setTransactionInProgress "T:Mission" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start GeoFence sendToVehicle
PlanManagerLog: "writeMissionItems T:GeoFence count:" 0
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 2
PlanManagerLog: "_writeMissionCount T:GeoFence count:_retryCount" 0 0
PlanManagerLog: "Sending error - _planTypeString(T:GeoFence) errorCode(2) errorMsg(Mission write failed, vehicle failed to send final ack.)"
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start rally sendToVehicle
PlanManagerLog: "writeMissionItems T:Rally count:" 0
PlanManagerLog: _setTransactionInProgress "T:Rally" 2
PlanManagerLog: "_writeMissionCount T:Rally count:_retryCount" 0 0
PlanManagerLog: "_handleMissionRequest T:Rally Incorrect mission_type received expected:actual" 2 0
PlanManagerLog: "_handleMissionAck T:Rally Incorrect mission_type received expected:actual" 2 0
PlanManagerLog: "_handleMissionAck T:Rally Incorrect mission_type received expected:actual" 2 1
PlanManagerLog: "_handleMissionAck T:Rally type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:Rally"
PlanManagerLog: _setTransactionInProgress "T:Rally" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle start mission sendToVehicle
MissionControllerLog: MissionControllerLog::sendToVehicle
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 0 0 "Mission Start"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 1 1 "Takeoff"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 2 2 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 3 3 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 4 4 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 5 5 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 6 8 "Landing Pattern"
PlanManagerLog: "writeMissionItems T:Mission count:" 9
PlanManagerLog: _setTransactionInProgress "T:Mission" 2
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 0
PlanManagerLog: "Retrying T:Mission MISSION_COUNT retry Count" 1
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 1
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 0 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequence number requested which has already been sent, sending again:" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 0 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 1
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 1 22
PlanManagerLog: "Sending error - _planTypeString(T:Mission) errorCode(2) errorMsg(Vehicle did not request all items from ground station: MISSION_REQUEST)"
PlanManagerLog: _setTransactionInProgress "T:Mission" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start GeoFence sendToVehicle
PlanManagerLog: "writeMissionItems T:GeoFence count:" 0
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 2
PlanManagerLog: "_writeMissionCount T:GeoFence count:_retryCount" 0 0
PlanManagerLog: "_handleMissionAck T:GeoFence Incorrect mission_type received expected:actual" 1 0
PlanManagerLog: "_handleMissionRequest T:GeoFence Incorrect mission_type received expected:actual" 1 0
PlanManagerLog: "_handleMissionAck T:GeoFence type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:GeoFence"
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start rally sendToVehicle
PlanManagerLog: "writeMissionItems T:Rally count:" 0
PlanManagerLog: _setTransactionInProgress "T:Rally" 2
PlanManagerLog: "_writeMissionCount T:Rally count:_retryCount" 0 0
PlanManagerLog: "_handleMissionRequest T:Rally Incorrect mission_type received expected:actual" 2 0
PlanManagerLog: "_handleMissionAck T:Rally type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:Rally"
PlanManagerLog: _setTransactionInProgress "T:Rally" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle start mission sendToVehicle
MissionControllerLog: MissionControllerLog::sendToVehicle
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 0 0 "Mission Start"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 1 1 "Takeoff"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 2 2 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 3 3 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 4 4 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 5 5 "Waypoint"
MissionControllerLog: _convertToMissionItems seqNum:lastSeqNum:command 6 8 "Landing Pattern"
PlanManagerLog: "writeMissionItems T:Mission count:" 9
PlanManagerLog: _setTransactionInProgress "T:Mission" 2
PlanManagerLog: "_writeMissionCount T:Mission count:_retryCount" 9 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 2
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 2 16
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber" 0
PlanManagerLog: "_handleMissionRequest T:Mission sequenceNumber:command" 0 16
QString::arg: Argument missing: _handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE, T:Mission
PlanManagerLog: "_handleMissionAck ArduPilot sending possibly bogus MAV_MISSION_INVALID_SEQUENCE" 0
PlanManagerLog: "Sending error - _planTypeString(T:Mission) errorCode(2) errorMsg(Vehicle did not request all items from ground station: MISSION_REQUEST)"
PlanManagerLog: _setTransactionInProgress "T:Mission" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start GeoFence sendToVehicle
PlanManagerLog: "writeMissionItems T:GeoFence count:" 0
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 2
PlanManagerLog: "_writeMissionCount T:GeoFence count:_retryCount" 0 0
PlanManagerLog: "_handleMissionRequest T:GeoFence Incorrect mission_type received expected:actual" 1 0
PlanManagerLog: "_handleMissionAck T:GeoFence type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:GeoFence"
PlanManagerLog: _setTransactionInProgress "T:GeoFence" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle start rally sendToVehicle
PlanManagerLog: "writeMissionItems T:Rally count:" 0
PlanManagerLog: _setTransactionInProgress "T:Rally" 2
PlanManagerLog: "_writeMissionCount T:Rally count:_retryCount" 0 0
PlanManagerLog: "_handleMissionRequest T:Rally Incorrect mission_type received expected:actual" 2 0
PlanManagerLog: "_handleMissionAck T:Rally type:" "Mission accepted."
PlanManagerLog: "_handleMissionAck write sequence complete T:Rally"
PlanManagerLog: _setTransactionInProgress "T:Rally" 0
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
PlanMasterControllerLog: PlanMasterController::sendToVehicle Rally Point send complete
There was a problem hiding this comment.
I have to amend my initial comment. I just had the same issue when just uploading a mission that already is on the vehicle but I have a wireshark recording from the issue.
|
Just asking, is there a recipe for logging response times on mavlink, maybe with mavproxy or something? EDIT: This looks promising. I'll try wireshark next |
|
I think the technical way to find a response time would be to save the time diff from a PING message and add for processing time, but that's probably a little complicated for this purpose |
|
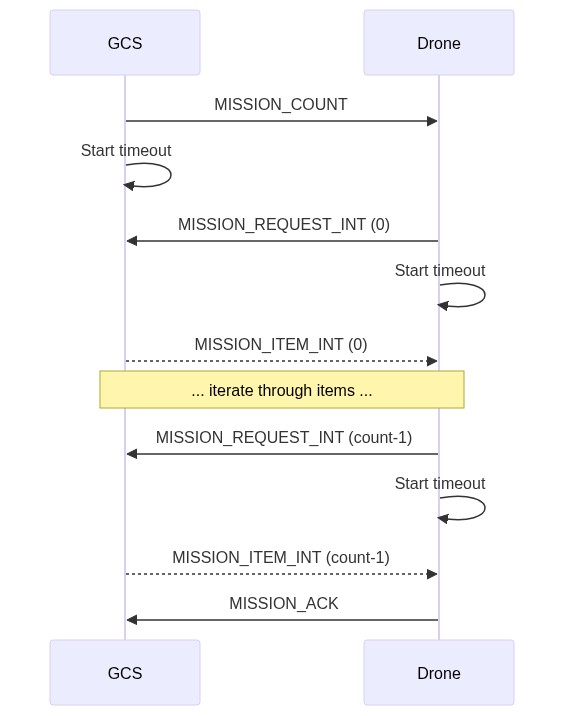
Is this flow chart mandatory? Because it's the wrong message id then. 3 is the ELRS BackPack and 1 is the PC. |

|
Ok, from what I figured out, I need to check how these duplicates from QGC to Vehicle happen. -2 |
|
Does Mission Planner work or does it show the same problem?
Don't know what you mean by this. |
I have no working setup with MissionPlanner via UDP. Windows 10 Issue.
This is a side finding, message is deprecated since 2020. |
That's just the difference between the INT version of messages and the non-INT versions. QGC supports both. |
4a1247d to
b5f418a
Compare
|
Intermediate change with additional timeout value. I'm checking if I must prevent repetition of MISSION_ITEM_INT being sent because flow chart does not account for it. I noticed that there are tests. Is there also coverage somewhere? |
|
I have just learned of TIMESYNC service but I can't grep it inside qgroundcontrol repo. |
|
You should be testing this first with mission uploads. That way QGC side is in control of the protocol state. Then I would up the timeouts to something like 5 minutes. Then try an upload. If you get double messages in the vehicle->qgc direction then this isn't a timeout problem it is a hardware setup problem. QGC doesn't support TIMESYNC. Don't see how that is related to this either way though. |
|
TIMESYNC is the successor of PING. The documentation is just completely outdated. So I requested change there as well. IMO, tracing link latency would end up somewhere in the LinkInterface. |
|
I have the measured round trip times, collected by a simple python script. On the UDP port of the target PC with ELRS 900M, Same Test with 2G4 ELRS results in 0.1 to 0.5 seconds and the median is 0.2 seconds. |
|
With close to two second latency mission problems would be the tip of the iceberg. Nearly all traffic to the vehicle which requires acks will fail. Did you verify that there isn't a double send problem vehicle->qgc that is unrelated to things timing out? |
|
I believe the measurements are valid. It seems to be a bandwidth issue on ELRS and how ELRS splits bandwidth between RC and Mavlink, according to LUA script, the bandwidths are: Note: The link-latency is half the round-trip-time, so 900ms worst-case according to measurements. |
|
PCAPNG attached, again, this time only the relevant packets... |
|
A side note: |
|
Just out of curiosity could you update to the latest commit and see if the latency is any different? I moved an expensive operation out of the UDP receive slot and it should make a noticeable difference |
b5f418a to
1c616ec
Compare
infinite errors on my setup |
That would only help missions. Parameter downloads/uploads will likely fail intermittently. Commands will fail because acks don't come back fast enough. QGC just isn't designed to work with round trip latencies close to two seconds. |
|
was there an issue with the serial link too? I think I might have a similar thing with being too harsh about the errors |
This patch fixes runtime issues which are observed on 900MHz ELRS. During mission download from the vehicle, repeat timeout occurs, causing mixup of request-response pairs which results in sequence errors of mission items. The repeat timeout is therefore increased to 1.5 seconds. GCS based message repetition eventually bites with ELRS stubborn sender feature. During mission upload to the vehicle, the regular timeout of 1.5 seconds is too tight and causes reported errors about not all mission items retrieved by vehicle. Therefore a separate timeout for MISSION_REQUEST_INT service is added with a value of 2.5 seconds which seems appropriate. For clarity the word default is added to the name of the original timeout values.
ec7b85d to
54a27d4
Compare
The commit with serial link had some effect on the parameter retrieval, no clue what the issue was. With 54a27d4 everything works again. I'll see that I write some function in LinkInterface to mimic what my python script has been doing and use that as timeout for these operations. |
PlanManager: Increase Timeouts for Mission Transfer
Description
This patch fixes runtime issues with Mission Upload/Download when the vehicle connection is based on a 900MHz ELRS System. (See Mavlink via ELRS feature.)
Two timeouts in PlanManager are increased.
The initial timeout is increased to cope with a delay when writing a Mission to the Flight Controller,
i.e. the Flight Controller needs some time to process Way-Points, Fences, Rally-Points etc. and this is enough to trigger the previously used timeout value. It is observed when initially starting the Mission Upload and when consecutively Fences and Rally-Points are written, regardless if there are any to be written.
The repeat timeout is increased to counter mix-up of requests resulting in sequence errors, i.e. when downloading the mission from the remote vehicle, QGroundControl already requested the item X+1 when the delayed response to this item X is received.
Test Steps
Test requires a PC or an arbitrary device running QGroundControl,
a 900MHz ELRS System running the Mavlink Connection and a Flight Controller with Ardupilot.
ELRS Hardware is somewhat standardized, so it should not matter what Manufacturer is used.
I use a Radiomaster TX12MK2 Handset together with a Radiomaster Bandit Transmitter and a BetaFPV SuperD Receiver.
Checklist:
Related Issue
Fixes #12076
By submitting this pull request, I confirm that you can use, modify, copy, and redistribute this contribution, under the terms of your choice.