depthy enables depth map generation from light-fields and stereo image pairs.




| Central view |  |
 |
 |
|---|---|---|---|
| Depth map | 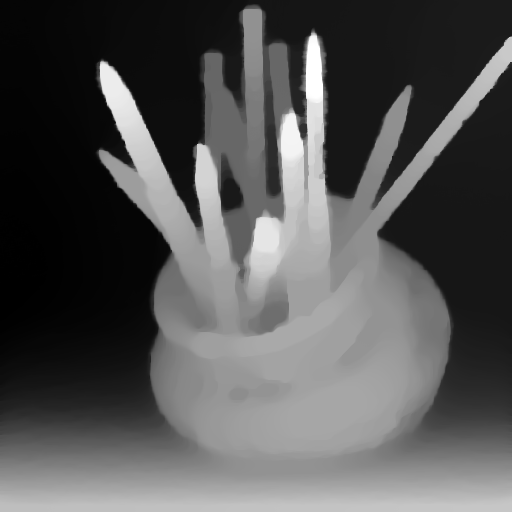 |
 |
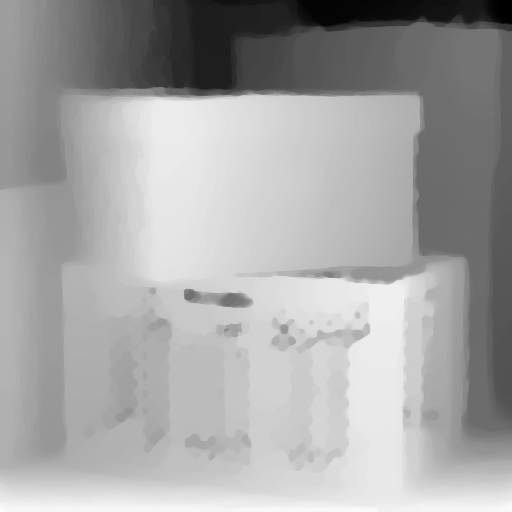 |
source: HCI data
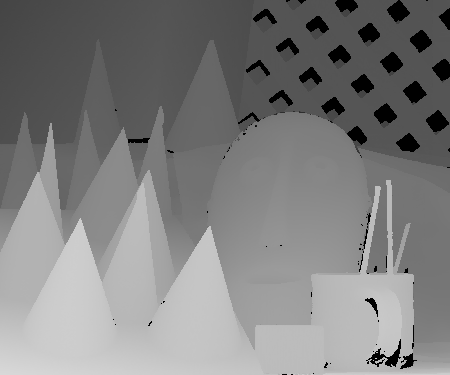
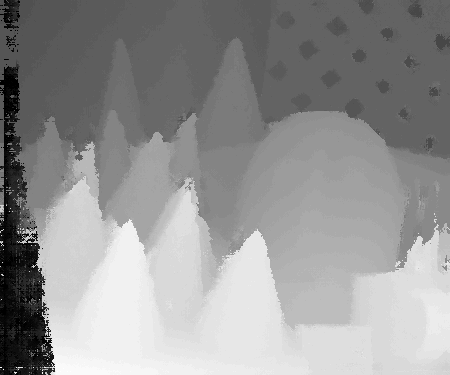
| Left Image | Ground Truth | Depthy (SGM) | OpenCV |
|---|---|---|---|
 |
 |
 |
 |
source: Middlebury data
- via pip:
- install with
pip3 install depthy - type
depthy -hto the command line once installation finished
- install with
- from source:
- install Python from https://www.python.org/
- download the source using
git clone https://github.com/hahnec/depthy.git - go to the root directory
cd depthy - load dependencies
$ pip3 install -r requirements.txt - install with
python3 setup.py install - if installation ran smoothly, enter
depthy -hto the command line
From the root directory of your downloaded repo, you can run the tool on the provided test data by
depthy -s './examples/data/pens/'
on a UNIX system where the result is found at ./examples/data/. A windows equivalent of the above command is
depthy --src=".\\examples\\data\\pens\\"
To infer light-field depth, you can specify the method or select your image folder manually with
depthy --win --method='epi'
For stereo depth, you would use
depthy --win --method='stereo'
More information on optional arguments, can be found using the help parameter
depthy -h
A documentation of the key functions is found at https://hahnec.github.io/depthy/. A reference integration using depthy's API can be found in PlenoptiCam.
@misc{depthy,
title={Depthy},
author={Christopher Hahne},
year={2021},
publisher = {GitHub},
journal = {GitHub repository},
howpublished = {\url{https://github.com/hahnec/depthy}}
}