Este repositorio contiene los archivos correspondientes al Trabajo Integrador de la Cátedra Programación Orientada a Objetos de la carrera Ingeniería en Mecatrónica de la Universidad Nacional de Cuyo.
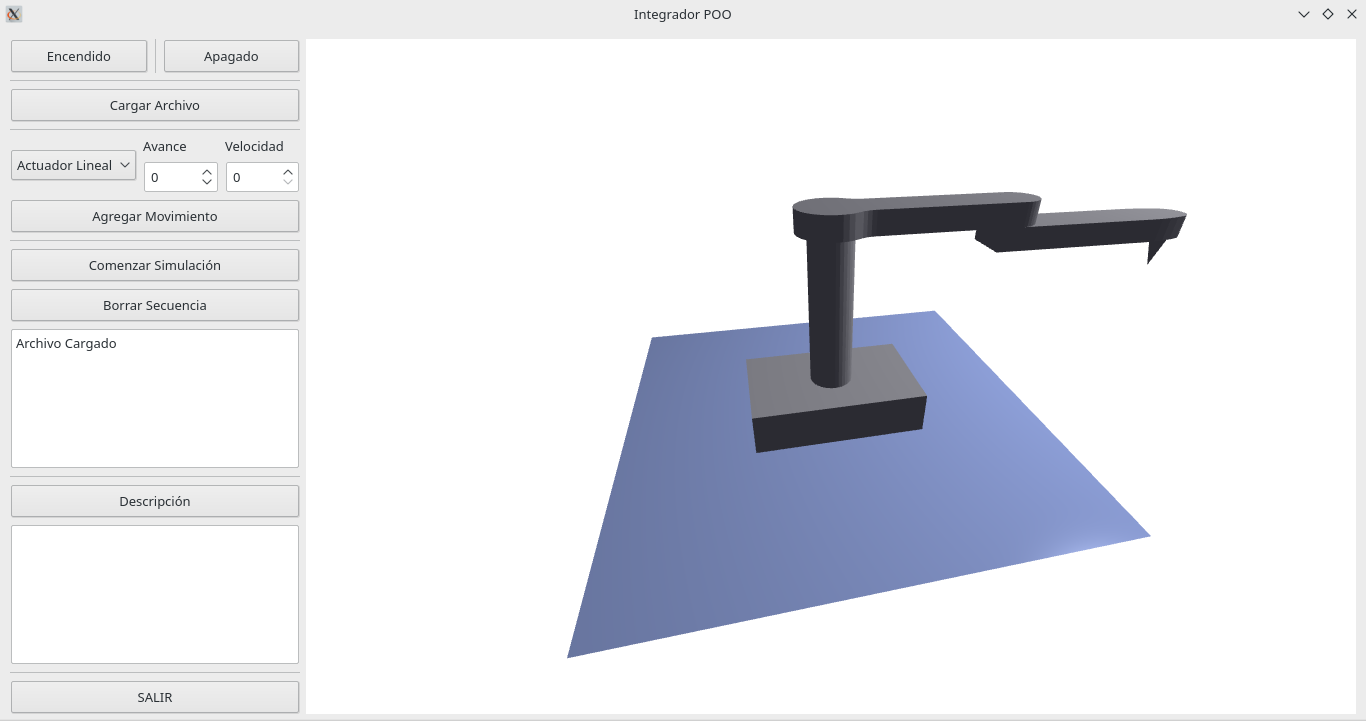
El objetivo es controlar un robot de 3 grados de libertad con efector final y crear la interfaz gráfica usando el framework Qt5 en C++. Para más información ver aquí el enunciado completo.
- Como entorno de desarrollo utilizamos QtCreator en la versión Open Source bajo la licencia GPL v3.
- Los diagramas UML fueron realizados con Umbrello UML Modeller, parte del proyecto KDE.
- Se utilizó el paquete Teletype de Atom como herramienta colaborativa en tiempo real.
Gino Avanzini y Emiliano Cabrino