You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Must calibration be done every power-up?
Like some others, I have my board mounted sideways (it's in a button that's designed to use the rotation as the triggering).
I've set my offsets with the board mounted flat.
With the CalibrateAccel/Gyro routines run, it tunes itself and returns 0.0x rotational positions, but if I don't calibrate, the final rotation readings end up at -59, 53, 80.
The problem is, aside from the time to calibrate (which I can tolerate if necessary), the board is mounted with the Y axis somewhat up/down. I think the problem with this is that any initial offsets I set apply to when it's flat. Then when it's at an angle, if I calibrate it, it tries to PID tune all the way to assuming Z is still vertical again. (It's also trying to do that in 6 loops but, if i'm correct, it's not something I'd want it to do anyway).
Now, I can establish my initial offsets with it mounted in this position, but gravity would really be pointing mostly on Y, a bit on Z, and even a tiny bit on X possibly.
For those interested, the button fits in the left-hand's palm, and looks like this:
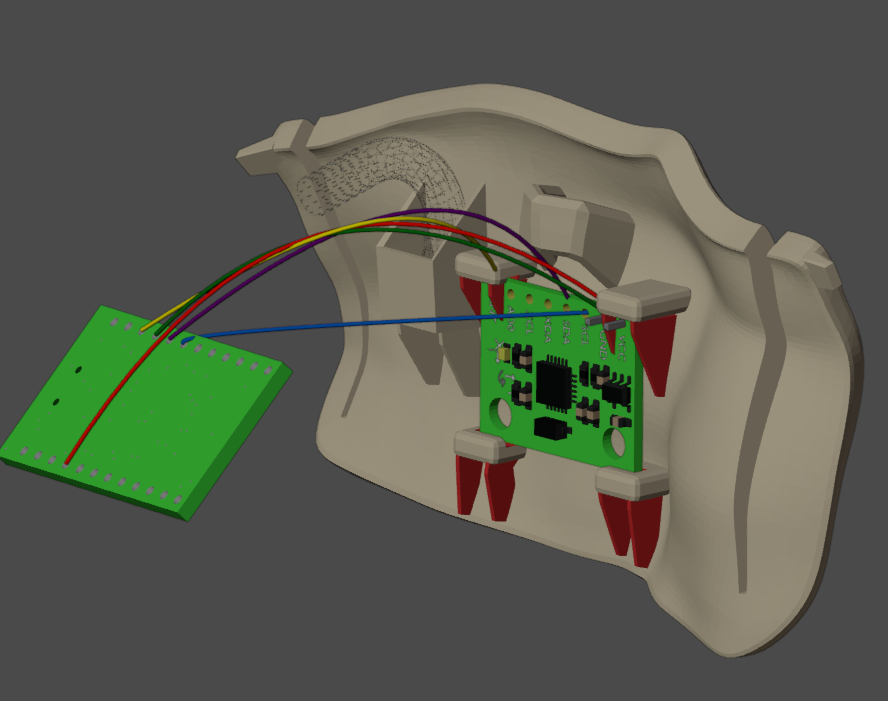
The MPU6050 is mounted inside the button itself (ignore the red 3d printing supports):
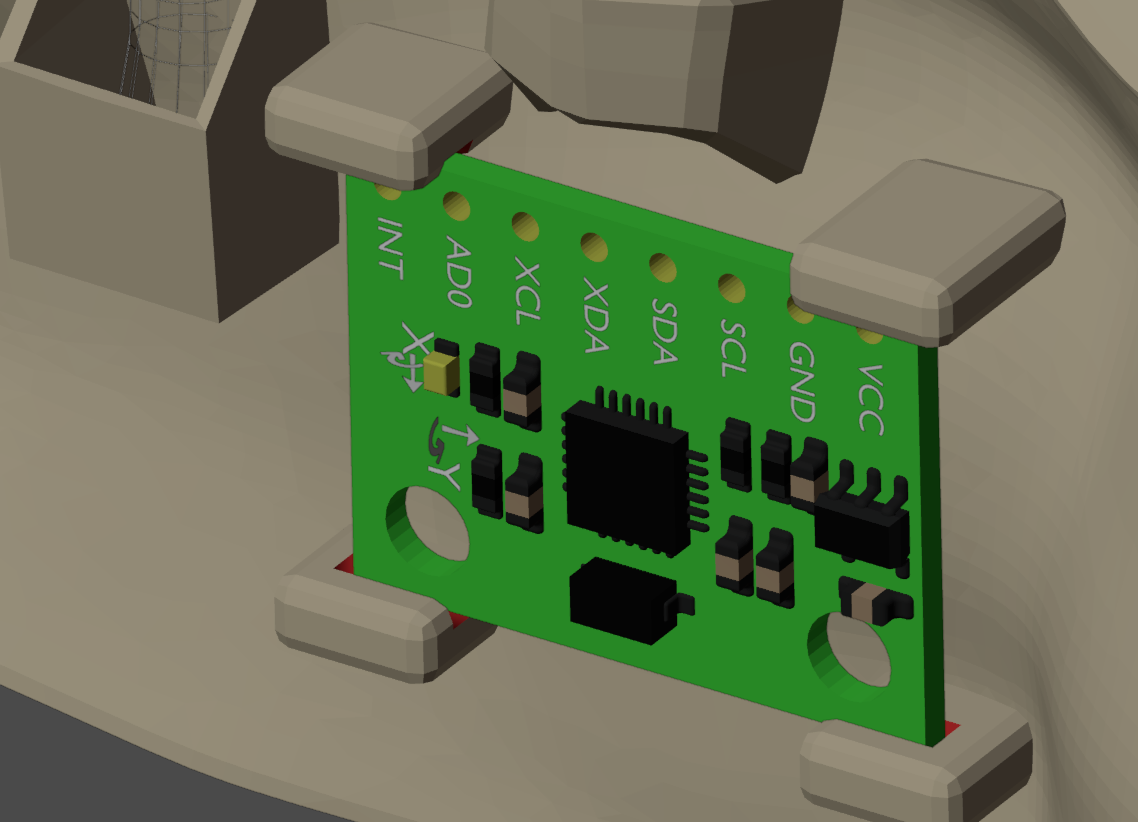
And here's a closeup where you can see the orientation and axes indicators I put in:
reacted with thumbs up emoji reacted with thumbs down emoji reacted with laugh emoji reacted with hooray emoji reacted with confused emoji reacted with heart emoji reacted with rocket emoji reacted with eyes emoji
-
Must calibration be done every power-up?
Like some others, I have my board mounted sideways (it's in a button that's designed to use the rotation as the triggering).
I've set my offsets with the board mounted flat.
With the CalibrateAccel/Gyro routines run, it tunes itself and returns 0.0x rotational positions, but if I don't calibrate, the final rotation readings end up at -59, 53, 80.
The problem is, aside from the time to calibrate (which I can tolerate if necessary), the board is mounted with the Y axis somewhat up/down. I think the problem with this is that any initial offsets I set apply to when it's flat. Then when it's at an angle, if I calibrate it, it tries to PID tune all the way to assuming Z is still vertical again. (It's also trying to do that in 6 loops but, if i'm correct, it's not something I'd want it to do anyway).
Now, I can establish my initial offsets with it mounted in this position, but gravity would really be pointing mostly on Y, a bit on Z, and even a tiny bit on X possibly.
For those interested, the button fits in the left-hand's palm, and looks like this:
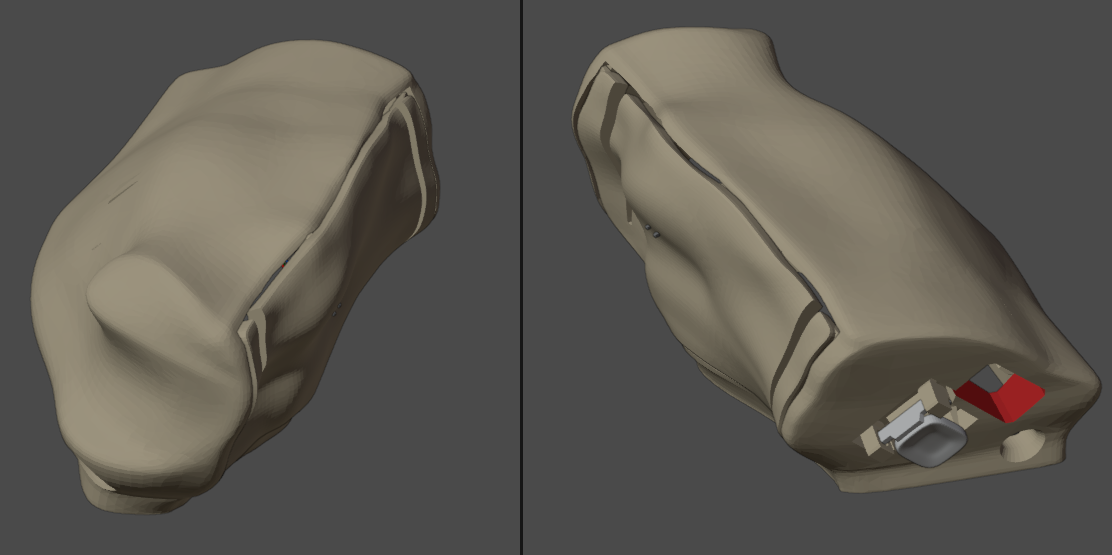
The MPU6050 is mounted inside the button itself (ignore the red 3d printing supports):
And here's a closeup where you can see the orientation and axes indicators I put in:
Beta Was this translation helpful? Give feedback.
All reactions